これが唯一のこる2001年ロボット「D・N・A・機楽の雄姿」。大会直前に肩の部分のフレームを落として、軽量化したりしました。この頃、電気回路を
自分たちで開発しないといけないと思いましたね。
 2002年ロボット「キャッチャーG」 (東北大会初戦敗退 特別賞)
2002年ロボット「キャッチャーG」 (東北大会初戦敗退 特別賞)
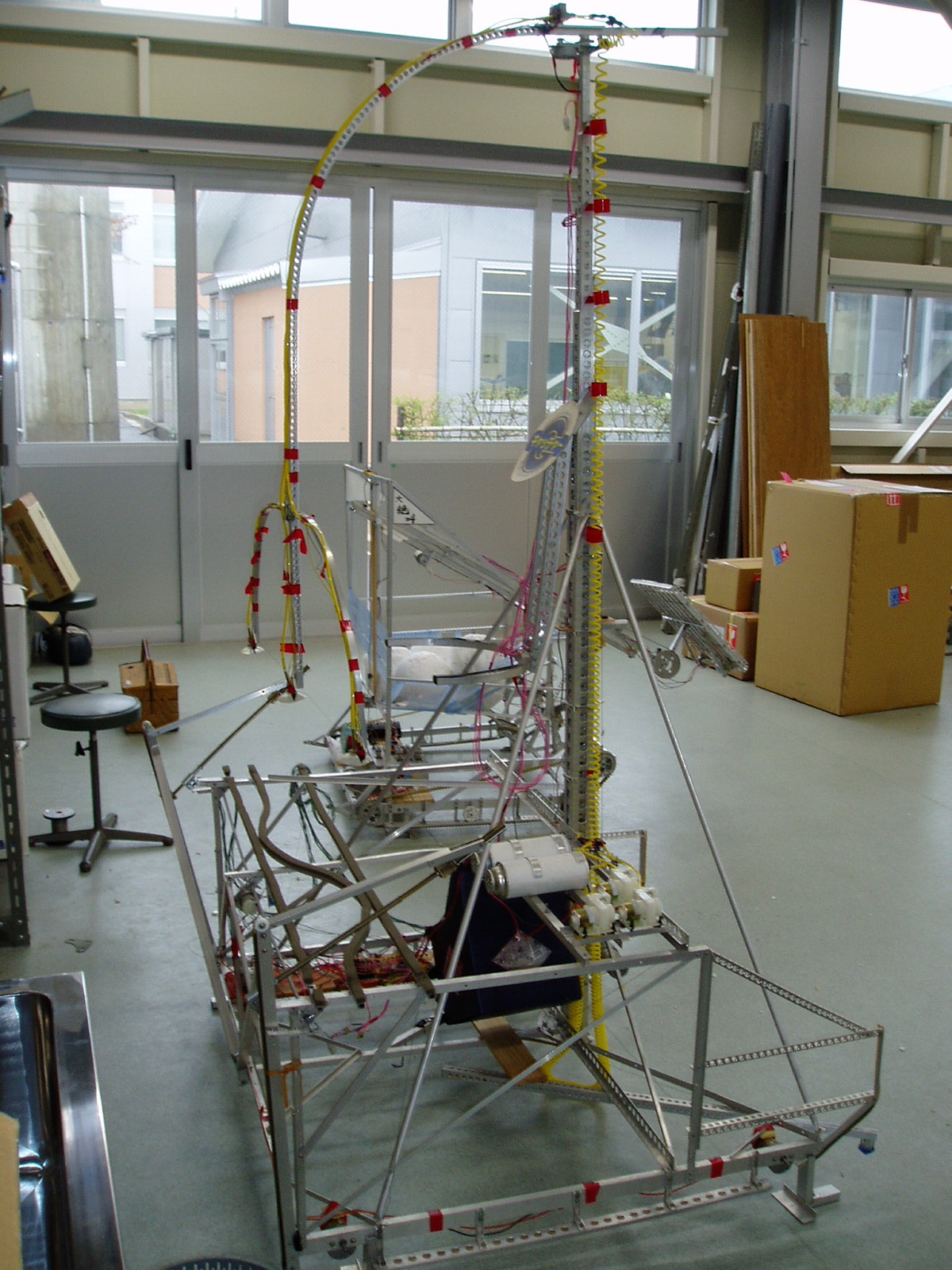
2002年のテーマは、「遠隔操縦のロボットで、約1mの高さから36個の段ポール箱で作られた階段を下り、その箱を3カ所のスポットに積み上げる。一番上に積み上げられた箱の色のチームがそのスポットを獲得する」というルールであった.
このロボットの特長は、吸盤により(図の3本に分かれているアームの先に吸盤がある)箱を獲得することができ、また、同時に3つの箱を取り込むことができる。垂直にのびたアームは約6mの高さ(2階建ての建物の窓付近)までのばすことが可能.また、1mの高さから降りる(というより落ちる)際にその衝撃を吸収するための機構を持っている.足回りはキャタピラを採用している.
名前の由来は、Gをつかめ(GはGravity(重力) , Glory(栄光),または部員の名前に関係あるとか無いとか.
東北大会では残念ながら1回戦敗退に終わったが、特別賞を獲得した.
詳しくはキャッチャーGの紹介(PDF file)へ.
キャッチャーG
2003年ロボット 「T.T」(東北大会初戦敗退 特別賞)
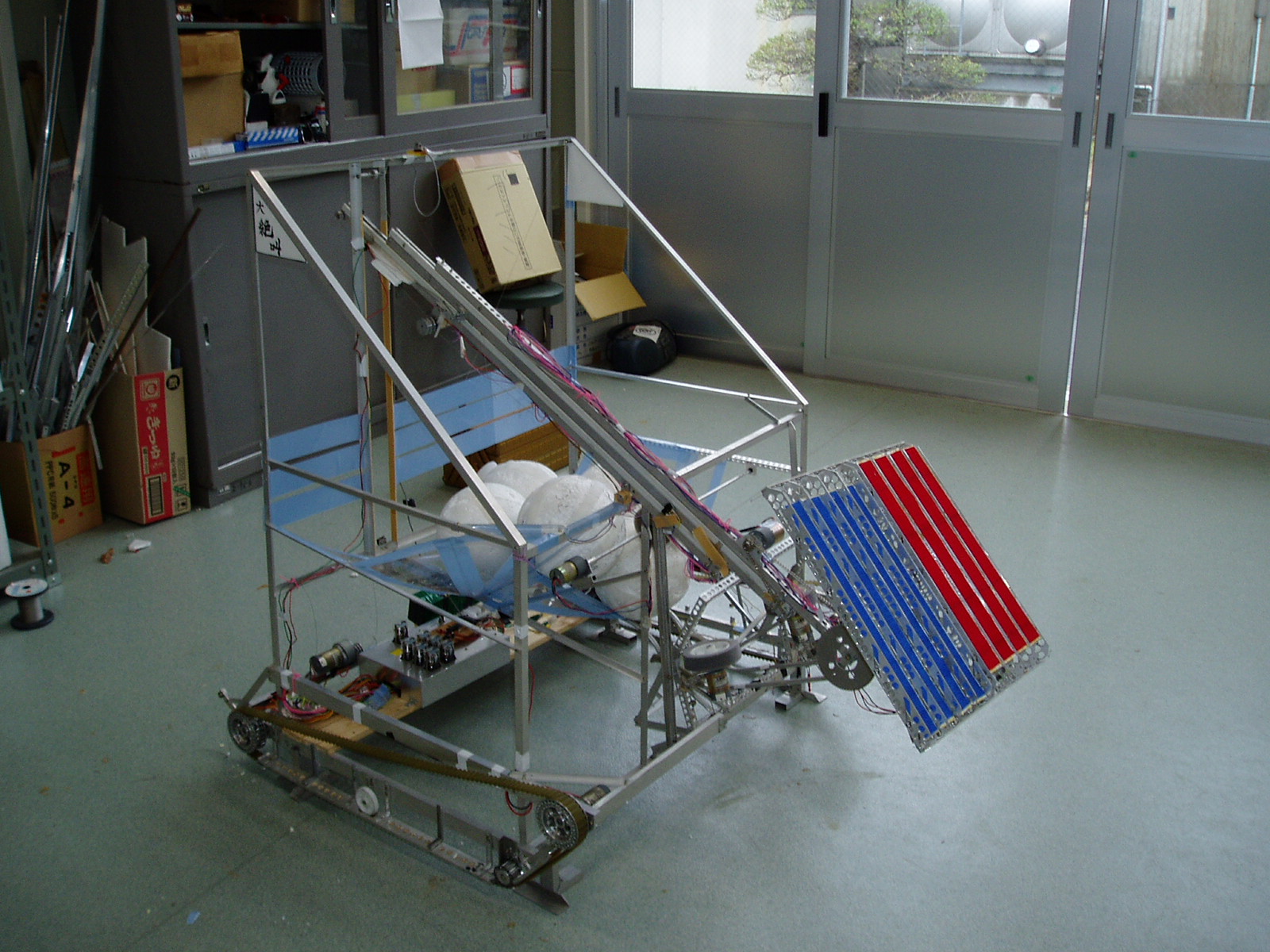 2003年のテーマは、球と立方体のマジックテープの付いた発泡スチロール製のオブジェを、3台の回転する円盤に貼り付け、円盤を右または左に(自チーム側に)回転させることで、点数を獲得するというテーマであった.
2003年のテーマは、球と立方体のマジックテープの付いた発泡スチロール製のオブジェを、3台の回転する円盤に貼り付け、円盤を右または左に(自チーム側に)回転させることで、点数を獲得するというテーマであった.
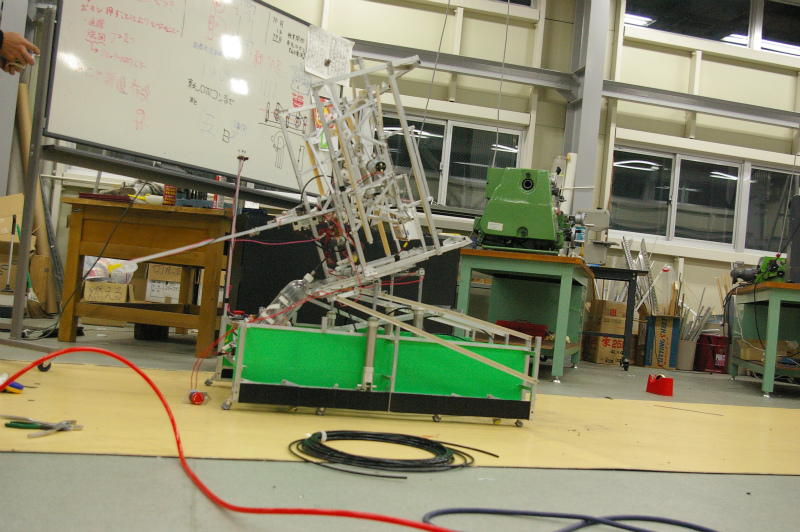
このマシンは、オブジェを前方のアームで取り、アームを伸ばし(最大3.5m程度)直接円盤に貼り付けるといった機構と(写真では、赤と青の色分けされた箇所)、マシン内に取り込んだ球のオブジェを射出機構で飛ばし、離れた円盤に対してオブジェを貼り付けるといった2つの戦法を採用している.
良いマシンであったと思うが、大会では実力を発揮できず、一回戦敗退した.しかしながらアーム部の機構が評価され、特別賞を受賞した.
球を飛ばすことのできる射出機構は高専祭等のイベントで非常に活躍したことを付記する.
T.T
2004年ロボット 「 救護魂V(きゅうごだましいファイブ) (東北大会初戦敗退)」
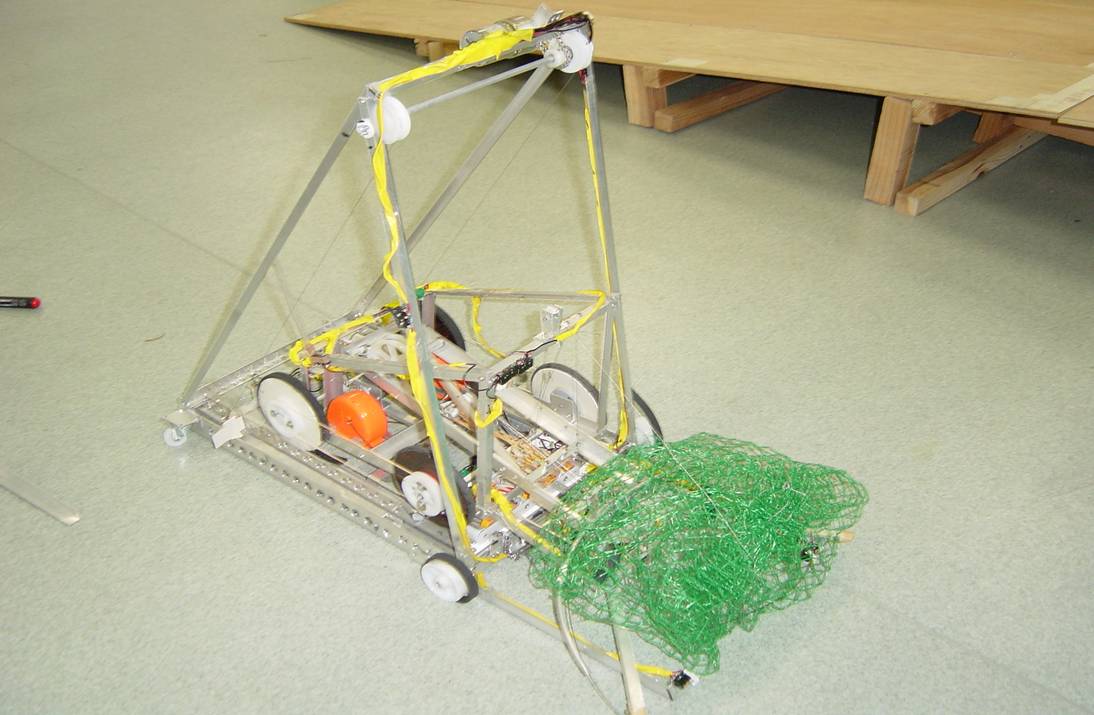
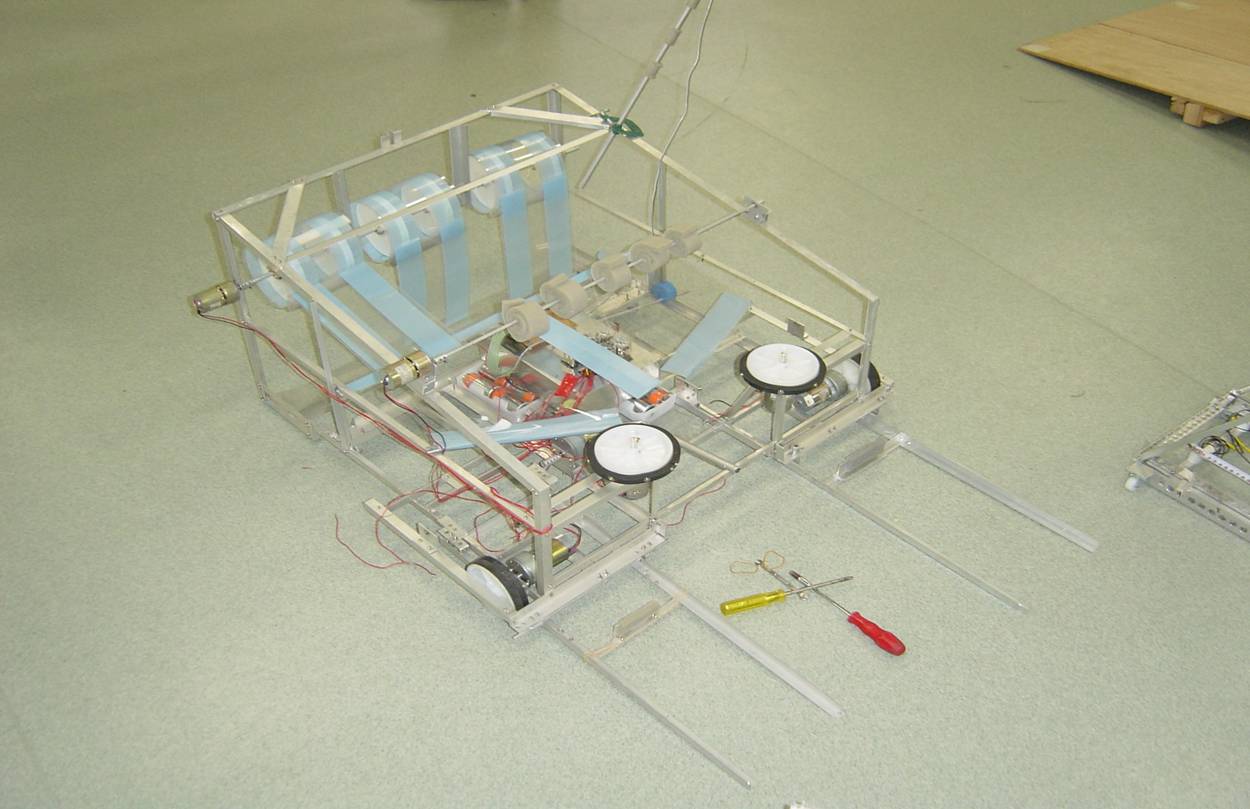 2004年のテーマはマーズラッシュ.メッセンジャーボールという自立型のロボットを用い、ローバーボール(アメフトのボールの形状)を進入禁止ゾーン内にあるオリンポススポットにゴールするというルールであった.左図は手動ロボット(通称親機)である.このマシンの特長は、前輪駆動(FF)であるため旋回性能が優れていること.マシン前部にあるフォークリフト部により、メッセンジャーボール(左中:メッセンジャーボールA、左下メッセンジャーボールB)を運ぶことができる.さらに、マシン後部にある部分で、いわゆるふつうのボール(バレーボールを)取り込み、射出部で打ち出すこともできる.東北大会では一回戦敗退.学生らは非常に悔しい思いをしたようである.マシン名の由来は5つの様々な要素(親機、子機A、子機B、射出部、オペレータ??)の組み合わせでいい仕事をする!というコンセプトであった.特撮物のような名前であるような気もするが、コメントは控えさせていただく.
2004年のテーマはマーズラッシュ.メッセンジャーボールという自立型のロボットを用い、ローバーボール(アメフトのボールの形状)を進入禁止ゾーン内にあるオリンポススポットにゴールするというルールであった.左図は手動ロボット(通称親機)である.このマシンの特長は、前輪駆動(FF)であるため旋回性能が優れていること.マシン前部にあるフォークリフト部により、メッセンジャーボール(左中:メッセンジャーボールA、左下メッセンジャーボールB)を運ぶことができる.さらに、マシン後部にある部分で、いわゆるふつうのボール(バレーボールを)取り込み、射出部で打ち出すこともできる.東北大会では一回戦敗退.学生らは非常に悔しい思いをしたようである.マシン名の由来は5つの様々な要素(親機、子機A、子機B、射出部、オペレータ??)の組み合わせでいい仕事をする!というコンセプトであった.特撮物のような名前であるような気もするが、コメントは控えさせていただく.
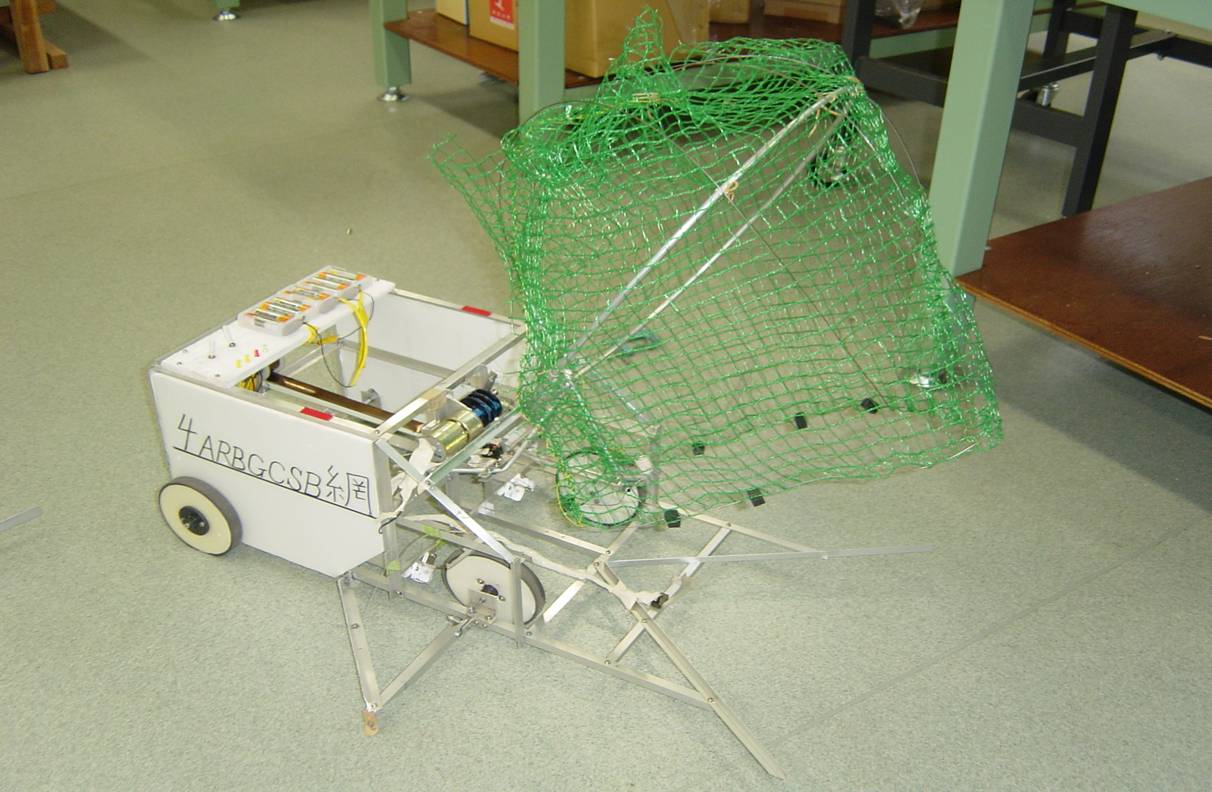 メッセンジャーボールA(通称子機A):スロープを使用するタイプである.手動ロボットから離脱し、ローバーボールを網によって取り込む.その後、オリンポススポットに到達するロボット.特別な制御などは行っていない.
メッセンジャーボールA(通称子機A):スロープを使用するタイプである.手動ロボットから離脱し、ローバーボールを網によって取り込む.その後、オリンポススポットに到達するロボット.特別な制御などは行っていない.
 メッセンジャーボールB(通称子機B):スロープを使用しないタイプである.外側のマシンの内部に小さなマシン(孫マシン)があり、並行リンク機構により、孫マシン持ち上げ、オリンポススポット目指す.大会直前まで苦労したマシンである.
メッセンジャーボールB(通称子機B):スロープを使用しないタイプである.外側のマシンの内部に小さなマシン(孫マシン)があり、並行リンク機構により、孫マシン持ち上げ、オリンポススポット目指す.大会直前まで苦労したマシンである.
2005年ロボット 「ふみきりあし」(東北大会2回戦敗退)
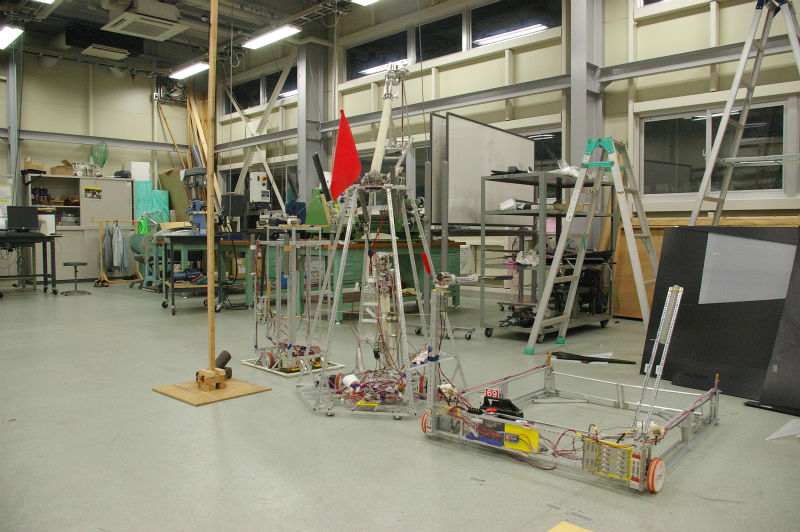
 2005年のテーマは、「大運動会」.バトンをもった手動ロボットが45cm×45cmのはしごの穴をくぐり、55cmの高さの平均台を渡り、75cmの高さのハードルを越えたのち、バトンを自動ロボットをに渡す.自動ロボットは約3mの壁を登り、スポットにバトンを差し込むことでバトンゴールとなる・・・といった(鬼のような)難しいルールでした.右図、平均台にてマシン調整中の図.東北大会では、1回戦勝利しました.久しぶりの勝利でしたがもっと時間があれば・・・という感じでしたね(時間があっても難しいテーマでしたが).ロボットの名前の由来は、昨年漢字のロボット名でしたので、今年はひらがなで・・??.
2005年のテーマは、「大運動会」.バトンをもった手動ロボットが45cm×45cmのはしごの穴をくぐり、55cmの高さの平均台を渡り、75cmの高さのハードルを越えたのち、バトンを自動ロボットをに渡す.自動ロボットは約3mの壁を登り、スポットにバトンを差し込むことでバトンゴールとなる・・・といった(鬼のような)難しいルールでした.右図、平均台にてマシン調整中の図.東北大会では、1回戦勝利しました.久しぶりの勝利でしたがもっと時間があれば・・・という感じでしたね(時間があっても難しいテーマでしたが).ロボットの名前の由来は、昨年漢字のロボット名でしたので、今年はひらがなで・・??.
 手動ロボットが立っている図.立つことができたのは大会1ヶ月前になってからでした.
手動ロボットが立っている図.立つことができたのは大会1ヶ月前になってからでした.
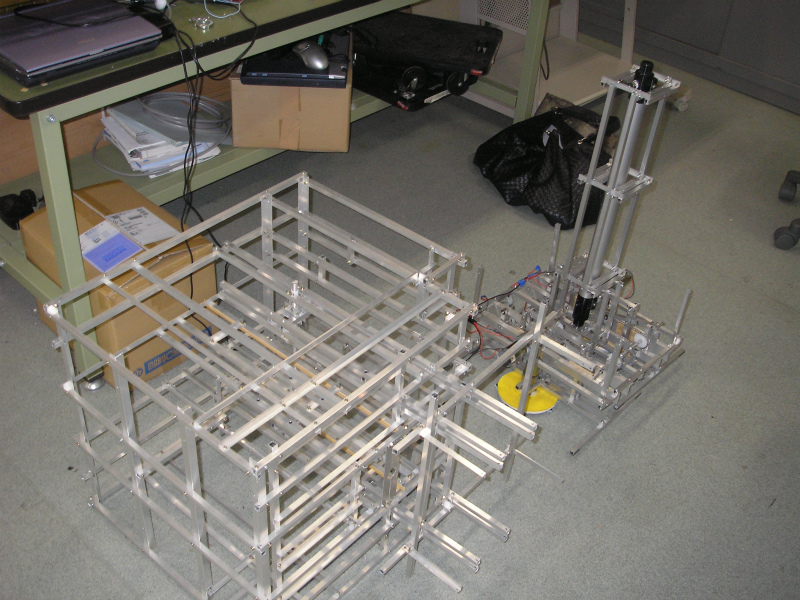
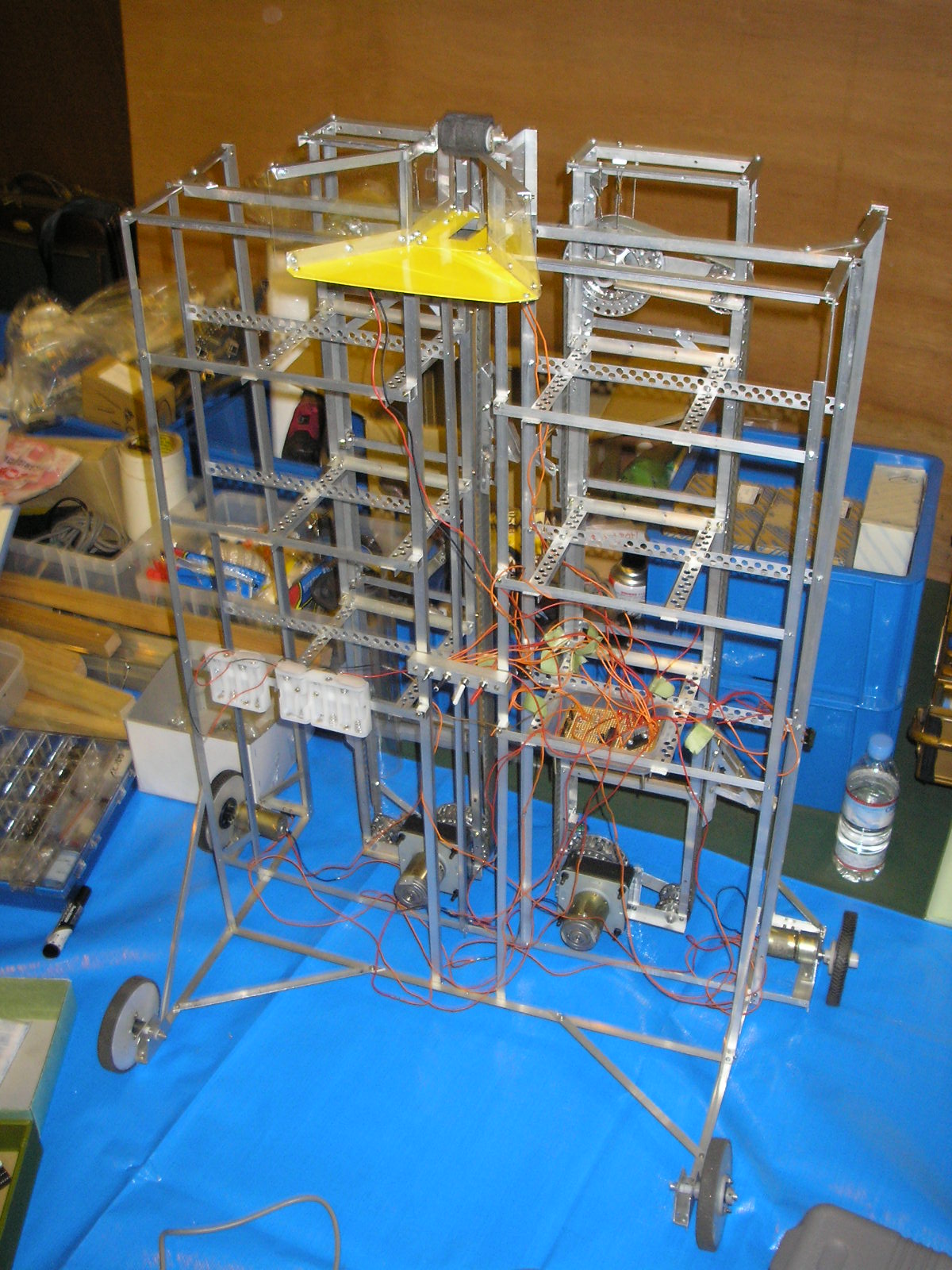 自動ロボットの外観.軽量化に苦労しました.配線等がむき出しのままですね.時間的にも非常に苦しんだロボットでした.
自動ロボットの外観.軽量化に苦労しました.配線等がむき出しのままですね.時間的にも非常に苦しんだロボットでした.
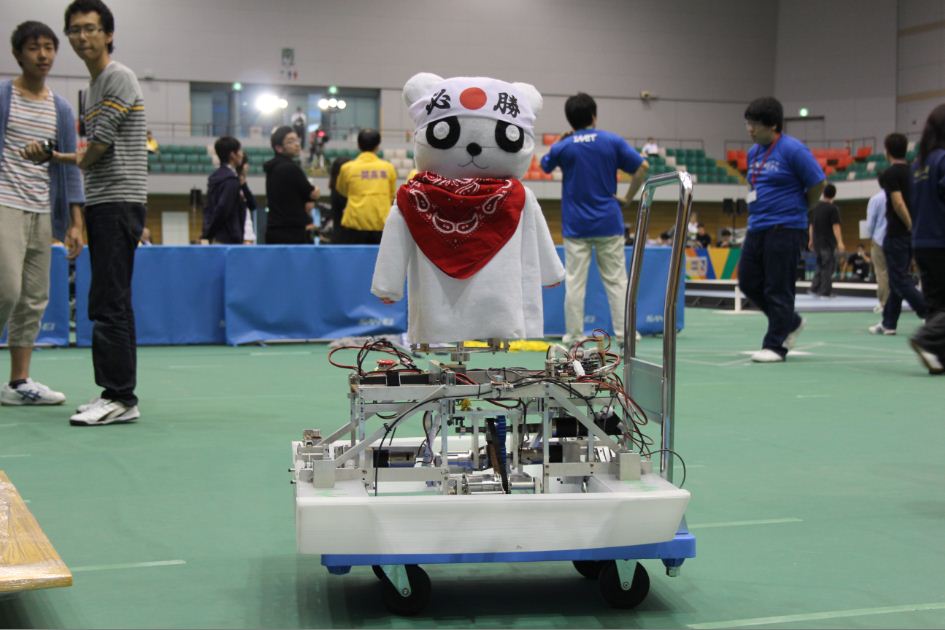
2006年ロボット 「ぶりこ」 (東北大会優勝 全国大会 2回戦敗退)
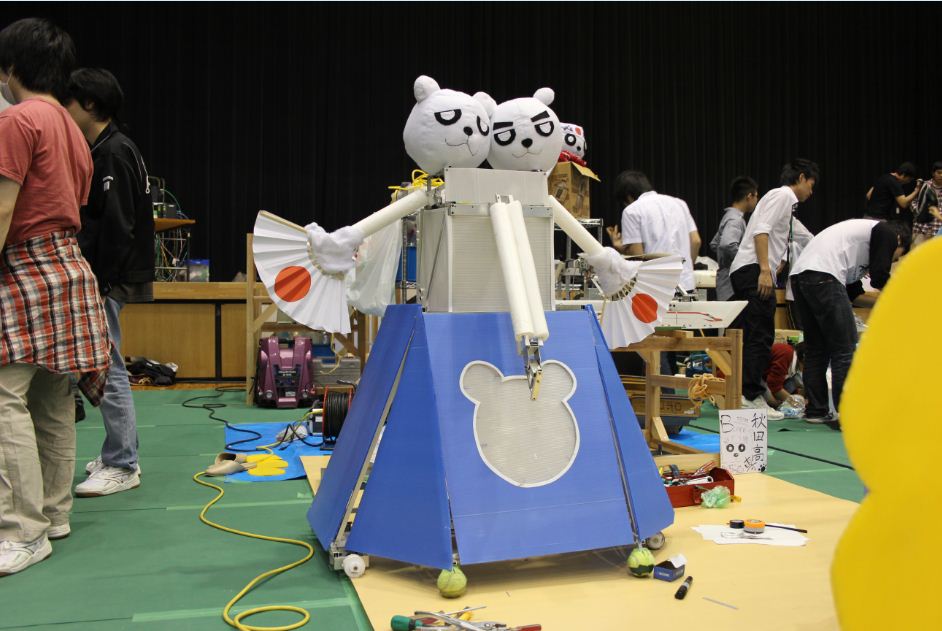
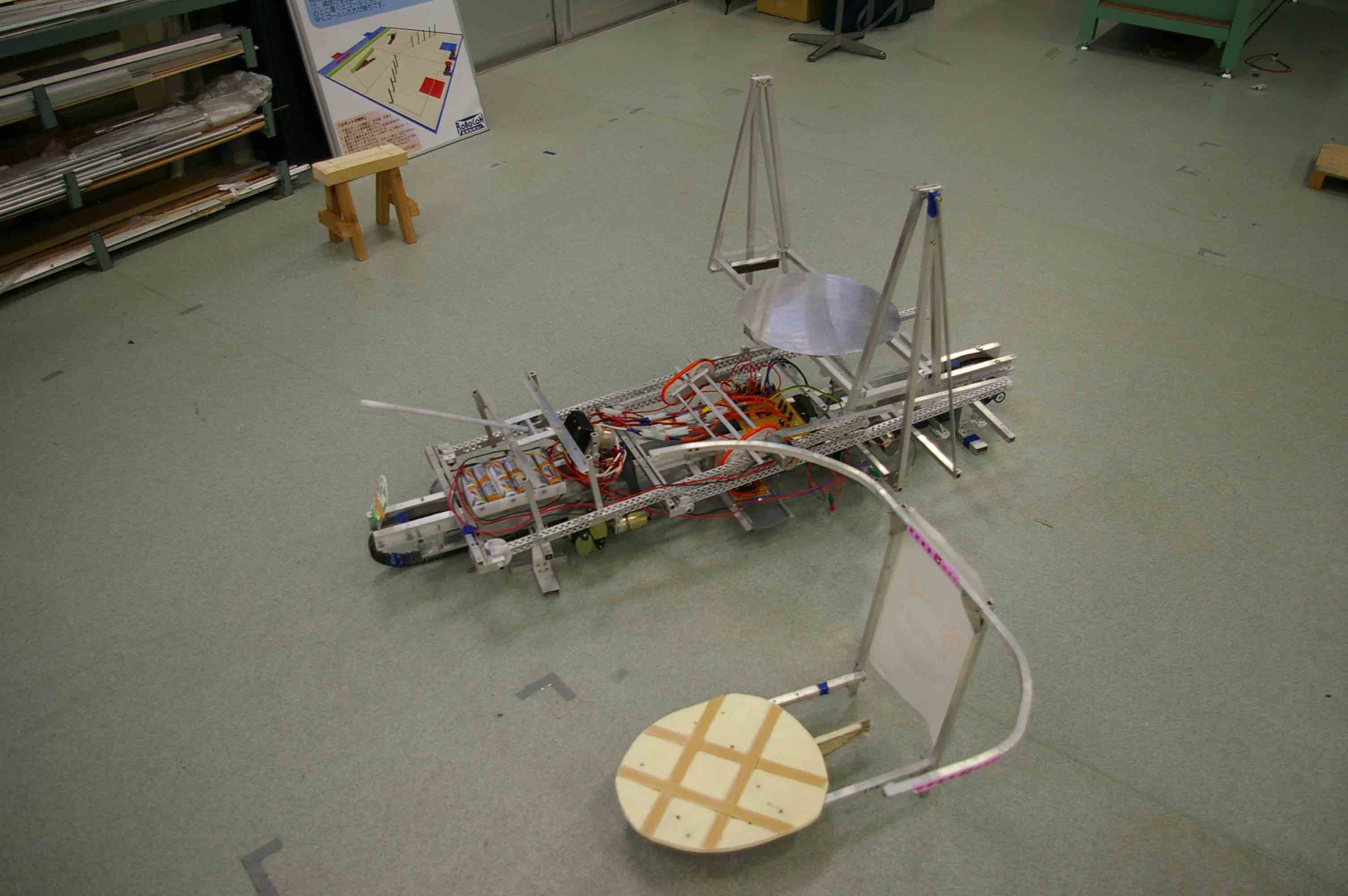 2006年のテーマは、「ふるさと自慢特急便」.手動ロボットがふるさとオブジェをトレイに載せた状態で,お堀を渡り、シーソーを通り、スラロームゾーンをくぐり抜ける.さらに,手動ロボットまたは自動ロボットがオブジェを持った状態で,縄跳びを3回跳ぶ(苦労しましたね・・・).その後オブジェをふるさとゴールにトライするといったテーマでした.右図、自動ロボットの図.(古いオブジェトレイと新しいオブジェトレイを付けたマシン).我がチームは東北大会で優勝しました.ロボットの名前の由来は、秋田県人なら誰でも知っているハタハタのたまごですので.詳しくはぶりこの紹介(PDF file)へ.
2006年のテーマは、「ふるさと自慢特急便」.手動ロボットがふるさとオブジェをトレイに載せた状態で,お堀を渡り、シーソーを通り、スラロームゾーンをくぐり抜ける.さらに,手動ロボットまたは自動ロボットがオブジェを持った状態で,縄跳びを3回跳ぶ(苦労しましたね・・・).その後オブジェをふるさとゴールにトライするといったテーマでした.右図、自動ロボットの図.(古いオブジェトレイと新しいオブジェトレイを付けたマシン).我がチームは東北大会で優勝しました.ロボットの名前の由来は、秋田県人なら誰でも知っているハタハタのたまごですので.詳しくはぶりこの紹介(PDF file)へ.
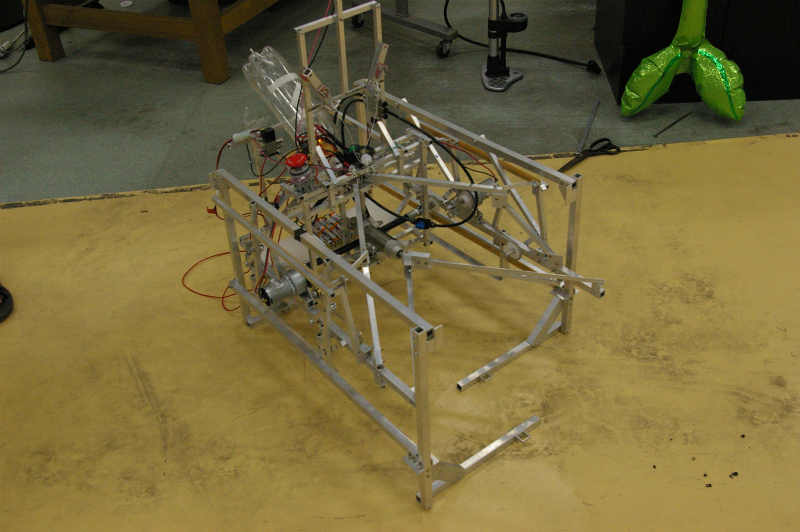
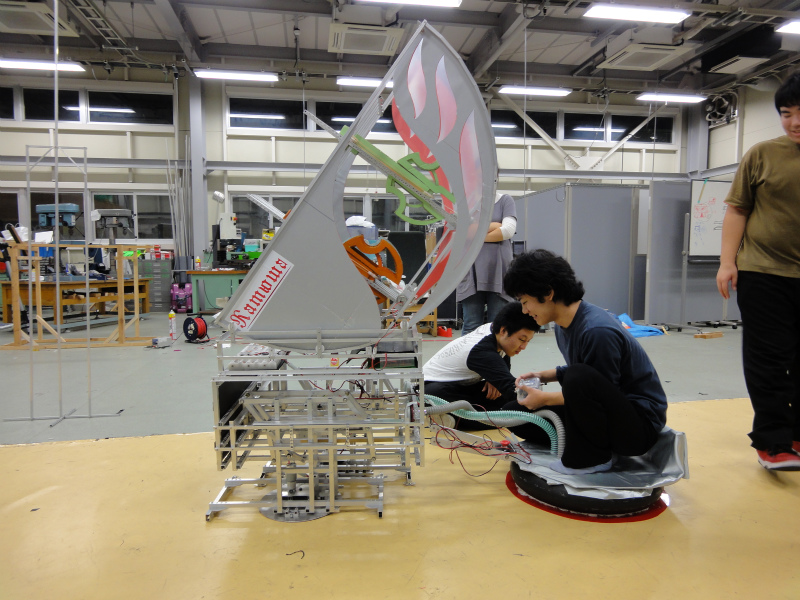
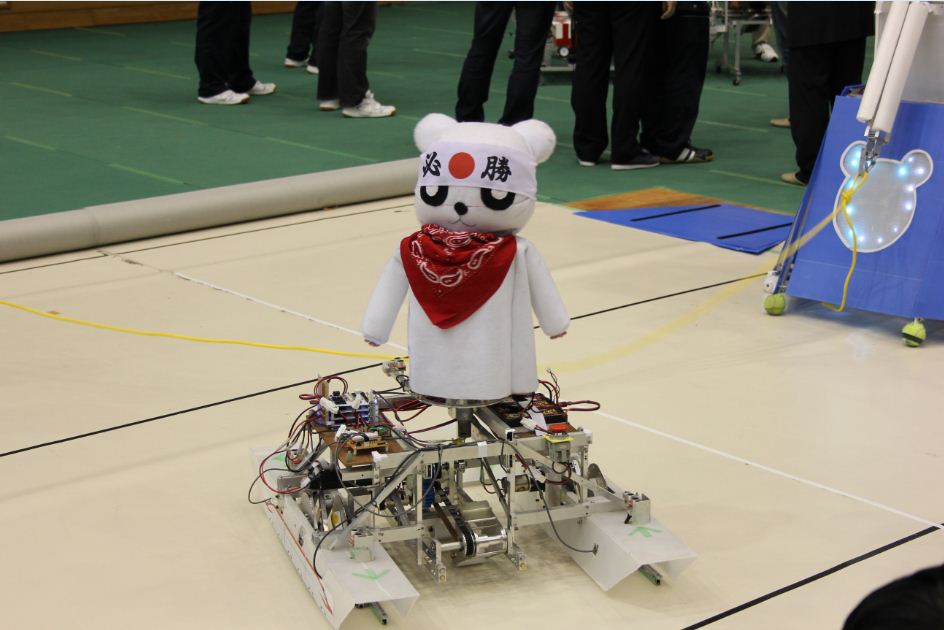
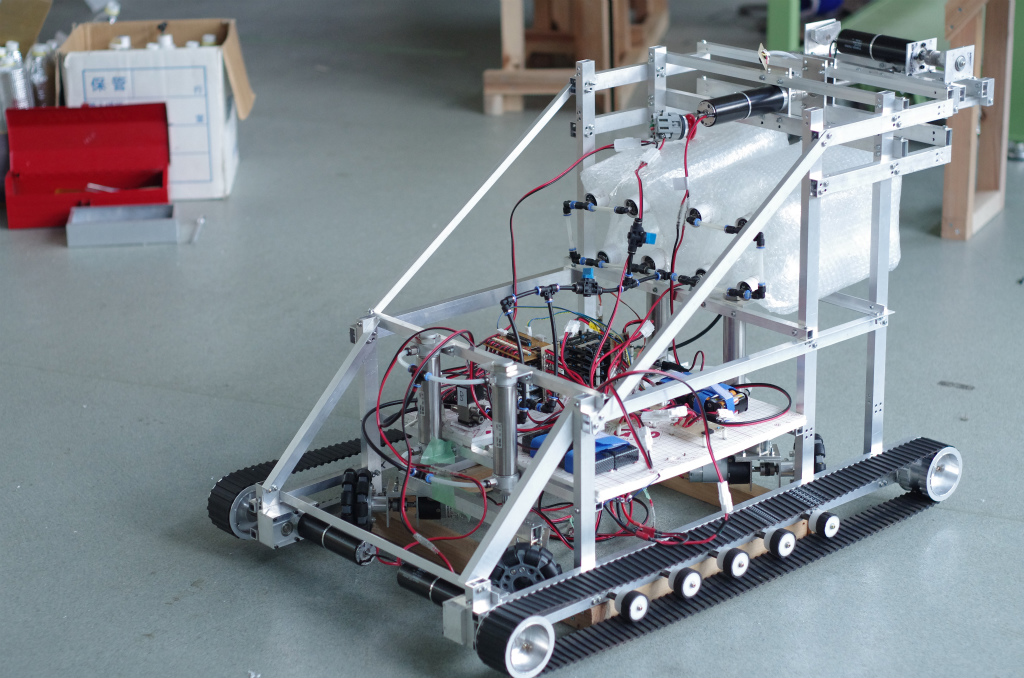
 自動ロボットです.7本のペットボトルとエアシリンダでジャンプをすることができます.表はなまはげの切り絵のデザインです.
自動ロボットです.7本のペットボトルとエアシリンダでジャンプをすることができます.表はなまはげの切り絵のデザインです.
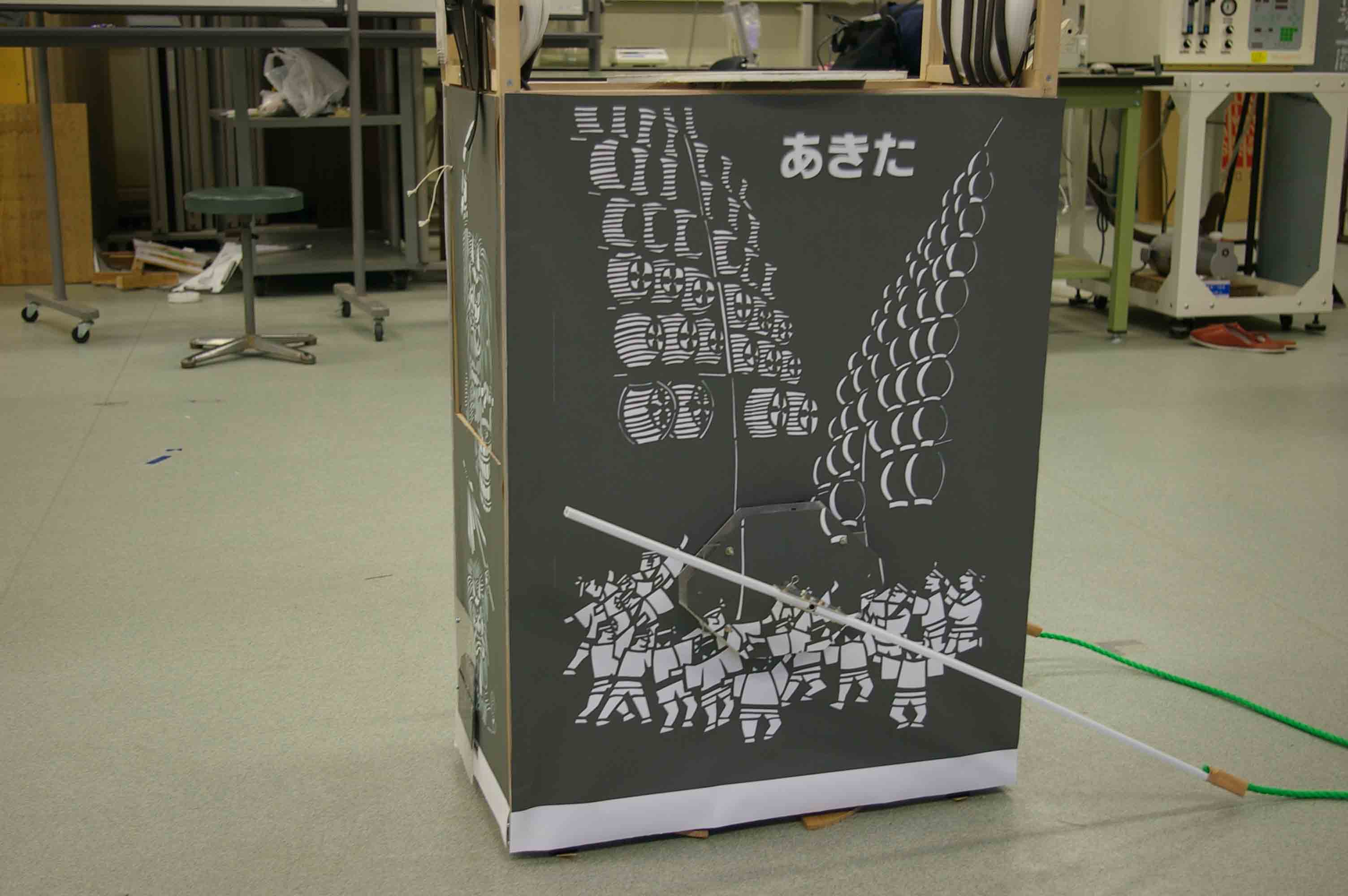 裏は、秋田の夏祭り「竿灯」のデザインとなっています.
裏は、秋田の夏祭り「竿灯」のデザインとなっています.
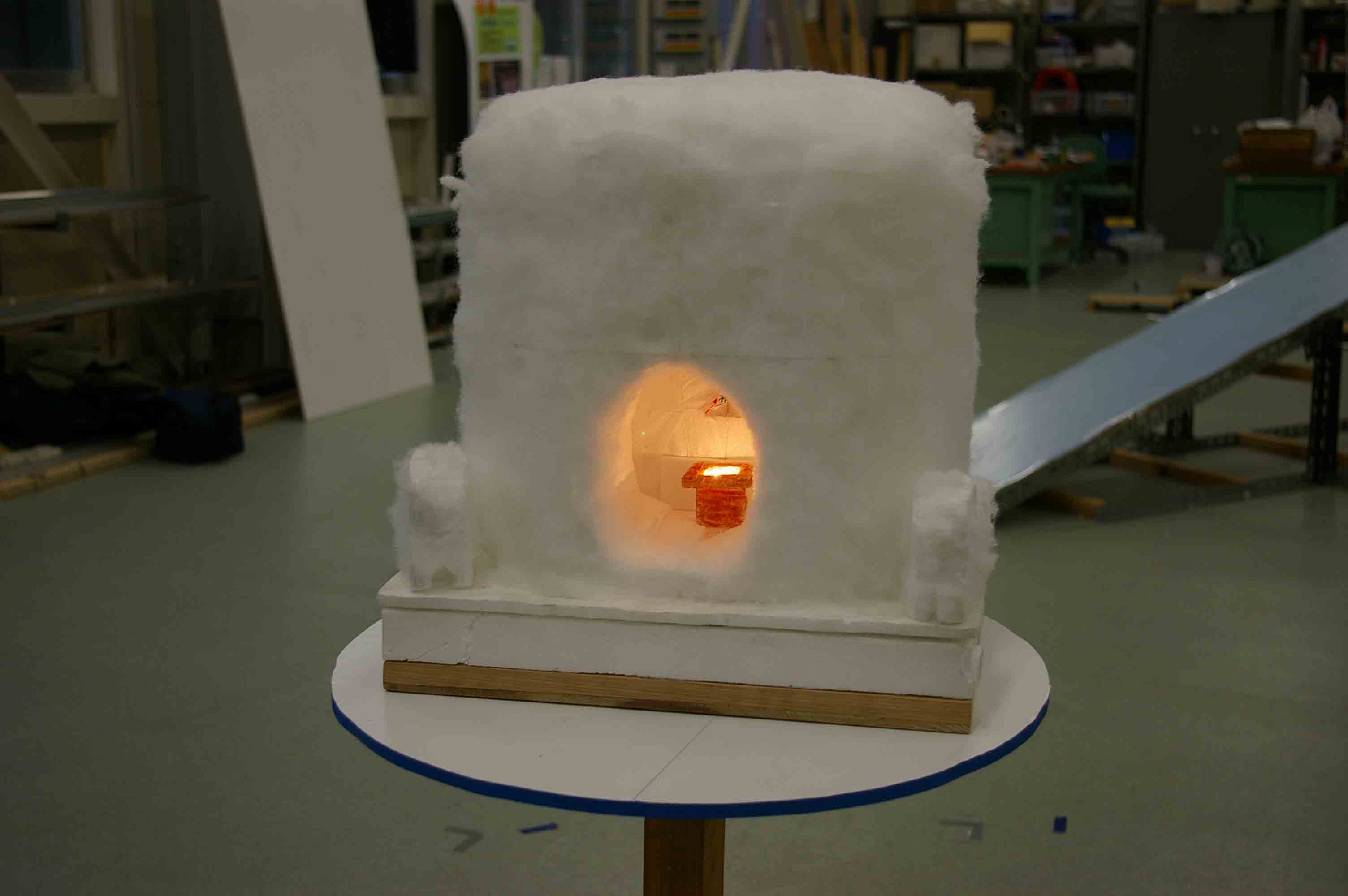 秋田高専Aチームのふるさとオブジェは「かまくら」.秋田県南部の横手市の冬の風物詩です.きれいですね.
秋田高専Aチームのふるさとオブジェは「かまくら」.秋田県南部の横手市の冬の風物詩です.きれいですね.
2007年ロボット 「小町(こまち)」(東北大会2回戦敗退)
 2007年のテーマ「風林火山ロボット騎馬戦」はロボットを用いた騎馬戦であり、3分
間の競技時間内に赤チーム、青チーム各2台ずつのロボットが、互いに旗を取り合うというものでした.ロボット同士の激しいぶつかり合いがあり、また、ロボットを素早く動か
す必要から、高い強度と軽量化を同時に実現しなくてはならないといった非常に難しいテーマでした.また、本年度は、ラジコン型の無線の採用が認められるなど、新しい技術も
取り入れての大会出場となりました.
2007年のテーマ「風林火山ロボット騎馬戦」はロボットを用いた騎馬戦であり、3分
間の競技時間内に赤チーム、青チーム各2台ずつのロボットが、互いに旗を取り合うというものでした.ロボット同士の激しいぶつかり合いがあり、また、ロボットを素早く動か
す必要から、高い強度と軽量化を同時に実現しなくてはならないといった非常に難しいテーマでした.また、本年度は、ラジコン型の無線の採用が認められるなど、新しい技術も
取り入れての大会出場となりました.
ラジコン部品に非常にお金がかかった思い出しか・・・
2008年ロボット 「THYME君(たいむくん)」(東北大会初戦敗退 特別賞)
 今年度の競技課題「ROBO−EVOLUTION 生命大進化」
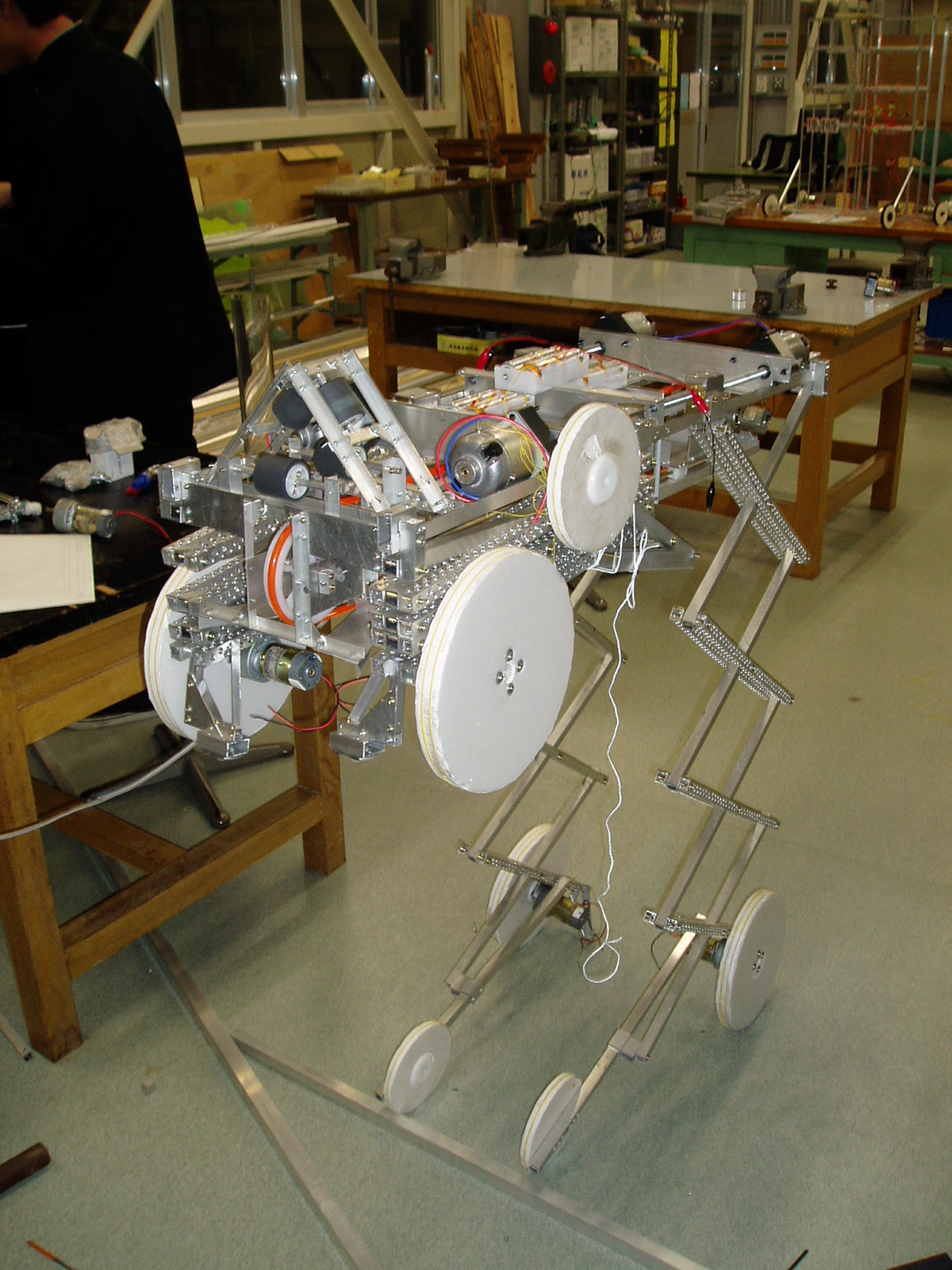
は、多足歩行ロボットがパイロンを一周したのち、20cmの高さの山を越え、2足歩行ロボットに変身し、人間のような2足歩行をした後ゴールするといったテーマでした。
子機は、モータ1軸でフレキシブル接続し、エアシリンダで左右に曲がるなど非常に凝った作りでした。2足歩行が採用された初年度で苦労しました。
今年度の競技課題「ROBO−EVOLUTION 生命大進化」
は、多足歩行ロボットがパイロンを一周したのち、20cmの高さの山を越え、2足歩行ロボットに変身し、人間のような2足歩行をした後ゴールするといったテーマでした。
子機は、モータ1軸でフレキシブル接続し、エアシリンダで左右に曲がるなど非常に凝った作りでした。2足歩行が採用された初年度で苦労しました。
 ロボット設計の担当のH君はロボットが好きで、ロボットが合体する、というのにこだわっていたような・・・。「THYME君」は、親機の多足ロボットのすばやい動きが評価され、特別賞をいただきました.
ロボット設計の担当のH君はロボットが好きで、ロボットが合体する、というのにこだわっていたような・・・。「THYME君」は、親機の多足ロボットのすばやい動きが評価され、特別賞をいただきました.
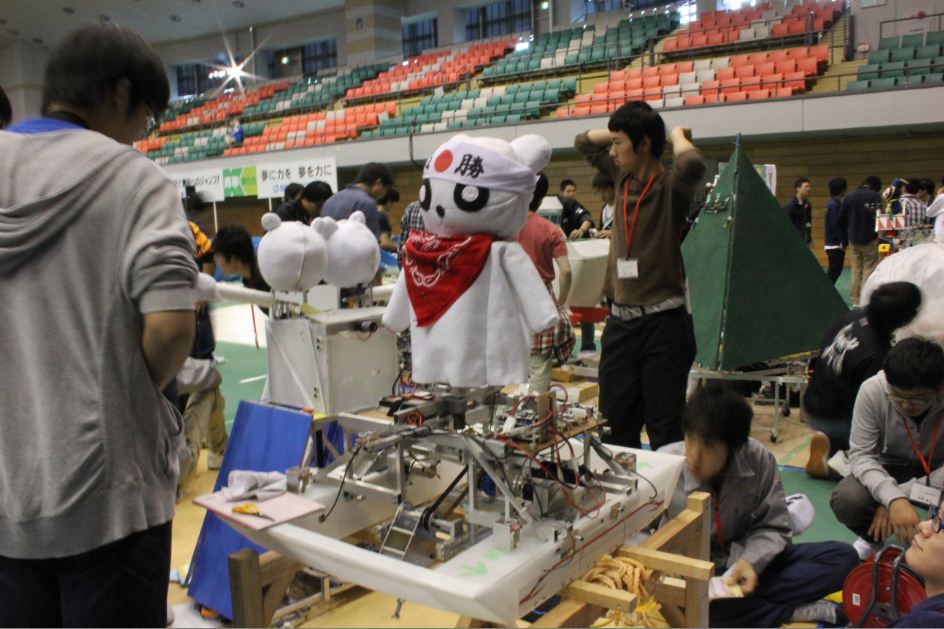
2009年ロボット 「三湖(みつうみ)(東北2回戦敗退)」、「秋禿(東北初戦敗退)」
 今年度の競技課題「DANCIN’ COUPLE ダンシングカップル」は、
手動ロボットである二足歩行ロボットと自動制御ロボットである多足歩行ロボットの2台の歩行ロボットが互いに協調してダンスをしたり、ジャンプをしたり、ターン、リフトをする
など、まるでフィギアスケートのように、難易度の高い技ほど点数が高いといったこれまでにない難しいルールであったように思います.また、それぞれのチームの技術力だけではな
くデザイン力も試されたテーマでした.秋田高専からは、田沢湖・八郎潟・十和田湖にまつわるテーマで臨んだ「三湖(みつうみ)」とナマハゲをテーマとした「秋禿(しゅうとく)」
の2チームが出場しました.両チームともそれぞれ持ち味を生かして健闘したものの、「秋禿」は初戦敗退、「三湖」は2回戦敗退という結果に終わりました.
今年度の競技課題「DANCIN’ COUPLE ダンシングカップル」は、
手動ロボットである二足歩行ロボットと自動制御ロボットである多足歩行ロボットの2台の歩行ロボットが互いに協調してダンスをしたり、ジャンプをしたり、ターン、リフトをする
など、まるでフィギアスケートのように、難易度の高い技ほど点数が高いといったこれまでにない難しいルールであったように思います.また、それぞれのチームの技術力だけではな
くデザイン力も試されたテーマでした.秋田高専からは、田沢湖・八郎潟・十和田湖にまつわるテーマで臨んだ「三湖(みつうみ)」とナマハゲをテーマとした「秋禿(しゅうとく)」
の2チームが出場しました.両チームともそれぞれ持ち味を生かして健闘したものの、「秋禿」は初戦敗退、「三湖」は2回戦敗退という結果に終わりました.
 本年度のロボコンのチーム体制は昨年度までのように、機械・物質チームおよび電気・環境チームといったチーム分けをせずに、2チーム合同で活動しました.初の試みであり、難しい
面もありましたが、電気回路や足回り(歩行する足の部分)を4つのロボットでほぼ同一の機構で製作し、ユニットの共有化ができるなど、今後につながる非常に意味のある活動となっ
たと思います.
本年度のロボコンのチーム体制は昨年度までのように、機械・物質チームおよび電気・環境チームといったチーム分けをせずに、2チーム合同で活動しました.初の試みであり、難しい
面もありましたが、電気回路や足回り(歩行する足の部分)を4つのロボットでほぼ同一の機構で製作し、ユニットの共有化ができるなど、今後につながる非常に意味のある活動となっ
たと思います.
2010年ロボット 「カチューシャ」、「ジーク(特別賞)」(東北ともに初戦敗退)
 今年度の競技課題「ロボ力車」は、
遠隔操縦で動く二足歩行ロボットが7.5mの距離をロボット単独で歩いた後、人が乗った乗り物と合体し、乗り物を引っ張り(または押して)、
地上2.5mの鍵穴に、鍵を差し込んでゴールするといったルールでした.歩くスピードと、乗り物を引っ張るパワーと、鍵を差し込む精密さが問われ
るこれまでにない難しいテーマであったように思います.
今年度の競技課題「ロボ力車」は、
遠隔操縦で動く二足歩行ロボットが7.5mの距離をロボット単独で歩いた後、人が乗った乗り物と合体し、乗り物を引っ張り(または押して)、
地上2.5mの鍵穴に、鍵を差し込んでゴールするといったルールでした.歩くスピードと、乗り物を引っ張るパワーと、鍵を差し込む精密さが問われ
るこれまでにない難しいテーマであったように思います.
 秋田高専からは、乗り物にホバークラフトを採用した「カチューシャ」と、乗り物に軽量な競
技用自転車の車輪を採用した「ジーク」の2つのチームが出場しました。両チームともそれぞれ持ち味を生かして健闘したものの、「カチューシャ」、
「ジーク」共に1回戦敗退という結果に終わりました.
秋田高専からは、乗り物にホバークラフトを採用した「カチューシャ」と、乗り物に軽量な競
技用自転車の車輪を採用した「ジーク」の2つのチームが出場しました。両チームともそれぞれ持ち味を生かして健闘したものの、「カチューシャ」、
「ジーク」共に1回戦敗退という結果に終わりました.
 しかしながら、チーム「ジーク」は、使用した鍵の「つかむ」機構が、他にはなくオリジナルである
ことが評価され、審査員特別賞をいただきました.
しかしながら、チーム「ジーク」は、使用した鍵の「つかむ」機構が、他にはなくオリジナルである
ことが評価され、審査員特別賞をいただきました.
2011年ロボット A「ザキエル&ストゥーパー(特別賞)」、B「Poler & Bowler」(東北ともに初戦敗退)
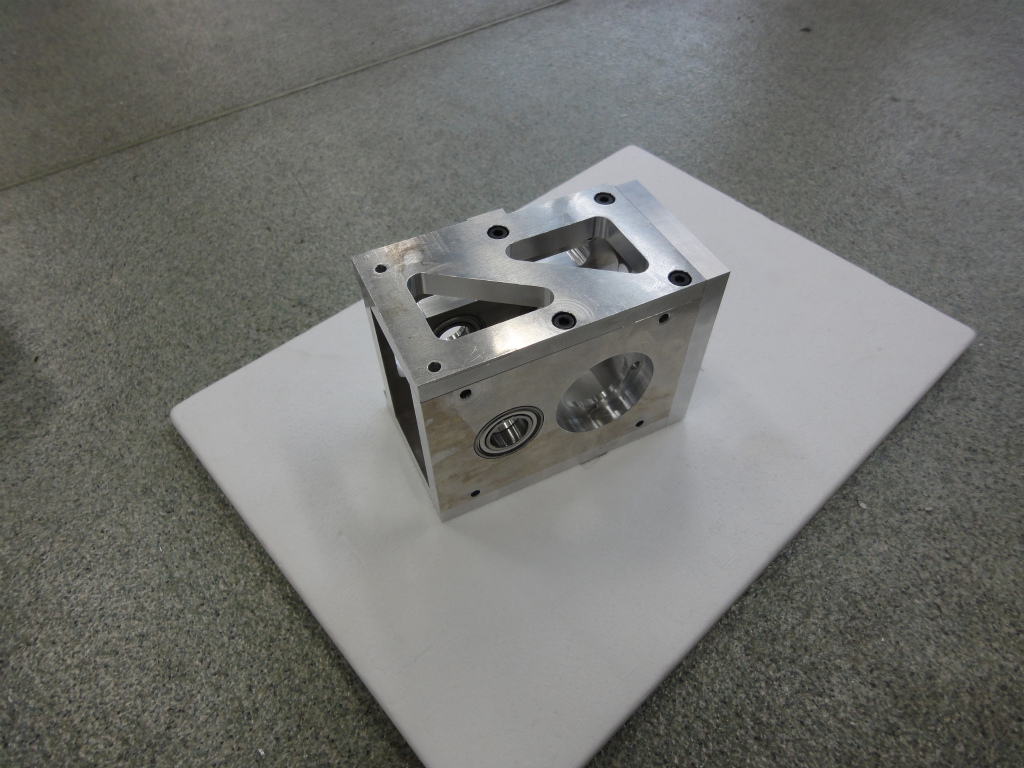 今年度の競技課題「ロボ・ボウル」は、
オフェンスロボがスローワーの学生からアメフトボールを受け取り、相手チームのデフェンスロボットをかいくぐり、エンドゾーンの学生へタッチダウンパスを
行うルールでした。図は、今年から導入したマクソンモータ用ギヤボックスで、マシンニングセンターを使用して作りました。本気度が
増してきたように思います。
今年度の競技課題「ロボ・ボウル」は、
オフェンスロボがスローワーの学生からアメフトボールを受け取り、相手チームのデフェンスロボットをかいくぐり、エンドゾーンの学生へタッチダウンパスを
行うルールでした。図は、今年から導入したマクソンモータ用ギヤボックスで、マシンニングセンターを使用して作りました。本気度が
増してきたように思います。
 この当時は、一般向けの展示も盛んに行っていた。図は秋田駅前拠点センターアルヴェにある科学学習館でのロボット展示の様子。
この当時は、一般向けの展示も盛んに行っていた。図は秋田駅前拠点センターアルヴェにある科学学習館でのロボット展示の様子。
 この年は、4台ものロボットを作る必要があった。ボールを投げるロボットということで子供達も大喜びであった。
この年は、4台ものロボットを作る必要があった。ボールを投げるロボットということで子供達も大喜びであった。
 Poler & Bowlerである。大会前日のテストランでは好成績であった。大会当日はスタートゾーンから出たところで、
マシンが右側に曲がり、壁に引っかかってスタートゾーンを出ることができなかった。右折左折用の足裏の回転板を
軽量化の為に取りはずしてしまったことが残念な結果を生んだ。
Poler & Bowlerである。大会前日のテストランでは好成績であった。大会当日はスタートゾーンから出たところで、
マシンが右側に曲がり、壁に引っかかってスタートゾーンを出ることができなかった。右折左折用の足裏の回転板を
軽量化の為に取りはずしてしまったことが残念な結果を生んだ。
 ザキエル&ストゥーパーである。先のロボットと全く同じ不具合でスタートゾーンから出ることができなかった。
ザキエル&ストゥーパーはばねを使う投球機構がオリジナルということで特別賞を受賞した。
この年から技術資料「アルカディア」の製作がスタートした。
ザキエル&ストゥーパーである。先のロボットと全く同じ不具合でスタートゾーンから出ることができなかった。
ザキエル&ストゥーパーはばねを使う投球機構がオリジナルということで特別賞を受賞した。
この年から技術資料「アルカディア」の製作がスタートした。
2012年ロボット A「はちろう」、B「ポーラー=☆(特別賞)」(東北ともに初戦敗退)
 今年度の競技課題「ベストペット」は、
コントローラを使わずに、ペットロボットと高専生が競技します。ビリヤードの方式で相手チームのブレイクショットでばらばらに散らばったボールを
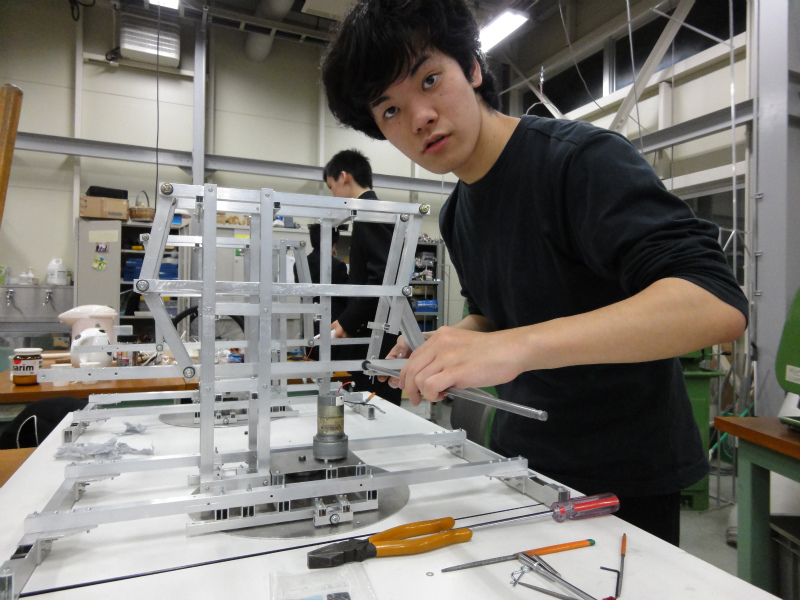
ペットと一緒に集め、ペットロボットに取り込み、壁のまと状の穴に投げ入れる競技であった。図は、はちろう。右端は現在のロボコン部長の秋山卓登君
でこの年颯爽と入学してきた。
今年度の競技課題「ベストペット」は、
コントローラを使わずに、ペットロボットと高専生が競技します。ビリヤードの方式で相手チームのブレイクショットでばらばらに散らばったボールを
ペットと一緒に集め、ペットロボットに取り込み、壁のまと状の穴に投げ入れる競技であった。図は、はちろう。右端は現在のロボコン部長の秋山卓登君
でこの年颯爽と入学してきた。
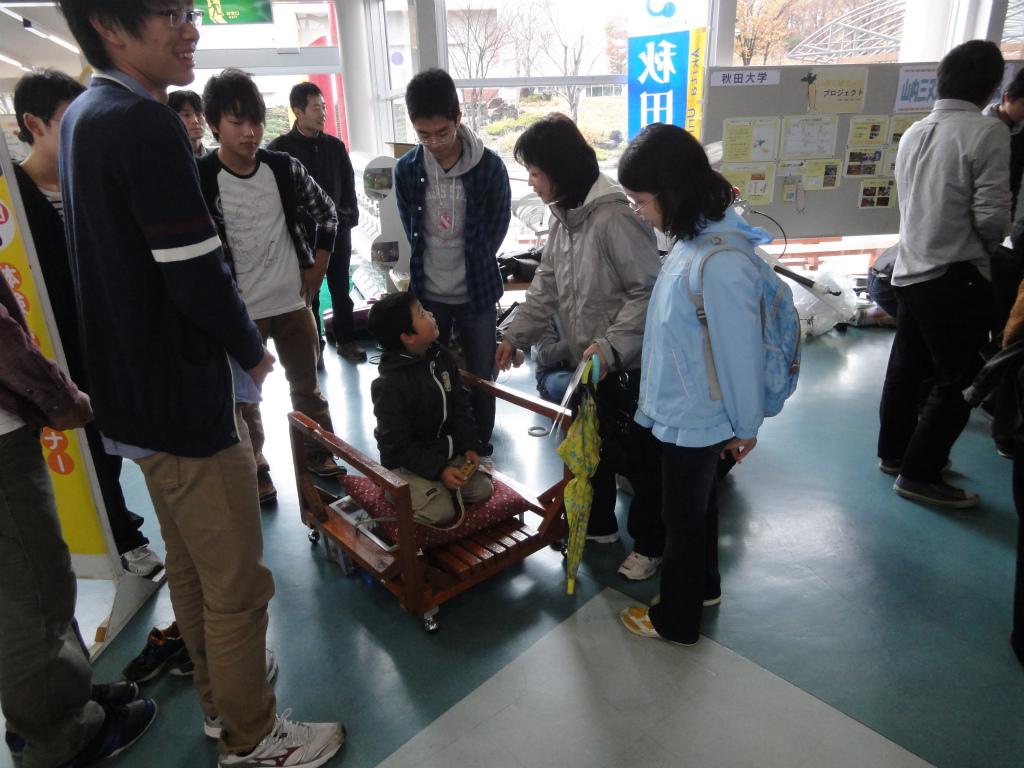 仙台市で行われた「生活福祉ロボコン」に参加しました。1年生の秋山卓登君、平塚輝君はこのときから非凡な才能の
片鱗を見せていた!!!。図は、操縦できる座布団である。名付けて「ザ・ブットン」。
仙台市で行われた「生活福祉ロボコン」に参加しました。1年生の秋山卓登君、平塚輝君はこのときから非凡な才能の
片鱗を見せていた!!!。図は、操縦できる座布団である。名付けて「ザ・ブットン」。
 ポーラー=☆である。釣り竿によるボールの投射は東北の他のロボットにもあったが、完成度が・・・・。
しかしながら、ポーラー=☆ は4足の状態から、2足の状態に変形するというオリジナル性(こだわり)が評価され
特別賞を受賞。小林もピットで審査員様に変形時の動画をお見せした思い出が・・・。
ポーラー=☆である。釣り竿によるボールの投射は東北の他のロボットにもあったが、完成度が・・・・。
しかしながら、ポーラー=☆ は4足の状態から、2足の状態に変形するというオリジナル性(こだわり)が評価され
特別賞を受賞。小林もピットで審査員様に変形時の動画をお見せした思い出が・・・。
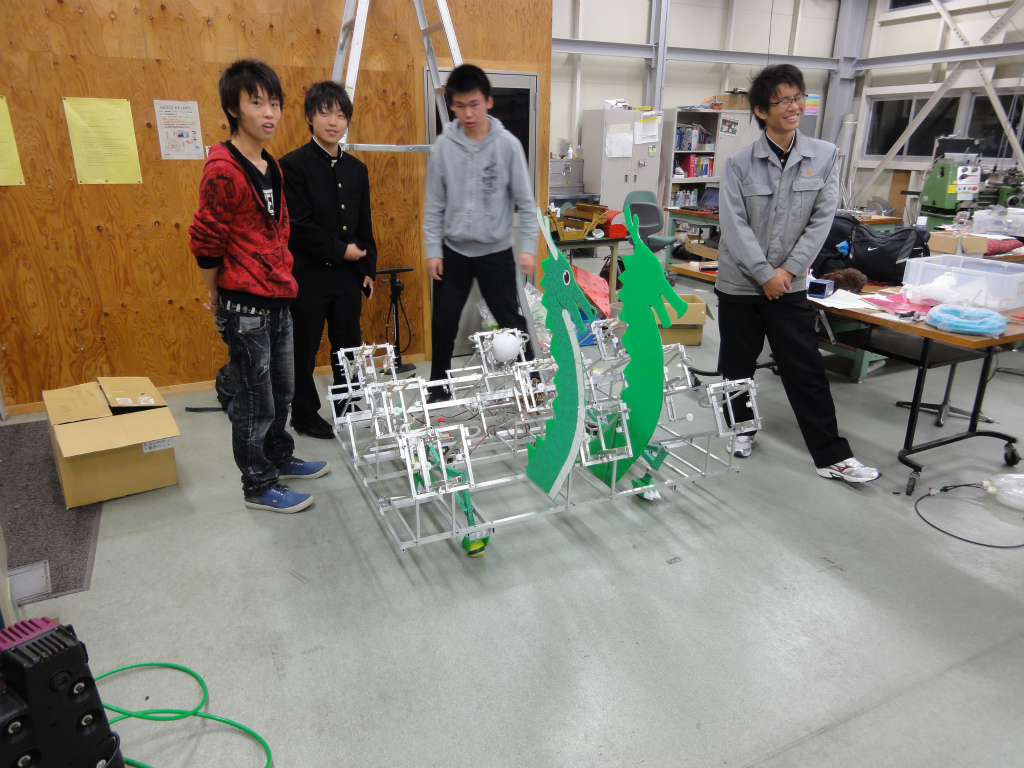
 はちろうである。竜の動きが小さいとかいろいろ指摘されたっけ。
ロボットとのコミュニケーションに用いる超音波センサは、この年のトレンドで、秋田高専もキャッチアップしていた。
この年、秋田高専は一勝もできなかったが、確実に力はついていた。と思う。
はちろうである。竜の動きが小さいとかいろいろ指摘されたっけ。
ロボットとのコミュニケーションに用いる超音波センサは、この年のトレンドで、秋田高専もキャッチアップしていた。
この年、秋田高専は一勝もできなかったが、確実に力はついていた。と思う。
2013年ロボット A「サークル・A・サーカス(東北ベスト4)」、B「ファミリー ManyCa」(特別賞)(東北初戦敗退)
 今年度の競技課題「Shall We Jump?」は、
昨年同様コントローラを使わず人間とロボットが協調して縄跳びをする競技でした。図はサークル・A・サーカスのジャンプロボット。競技ではジャンプの衝撃で
顔が取れたりしましたね。
今年度の競技課題「Shall We Jump?」は、
昨年同様コントローラを使わず人間とロボットが協調して縄跳びをする競技でした。図はサークル・A・サーカスのジャンプロボット。競技ではジャンプの衝撃で
顔が取れたりしましたね。
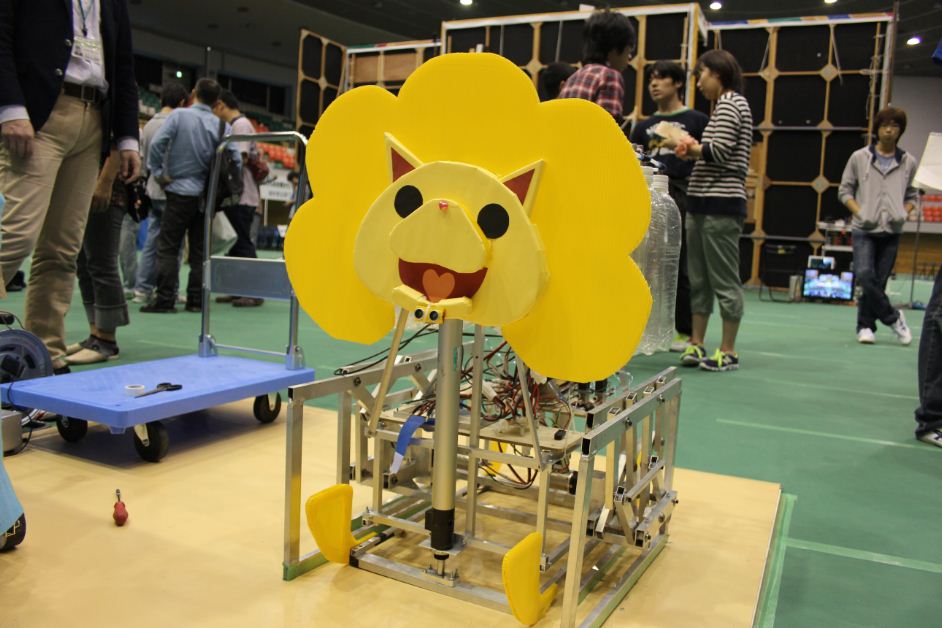
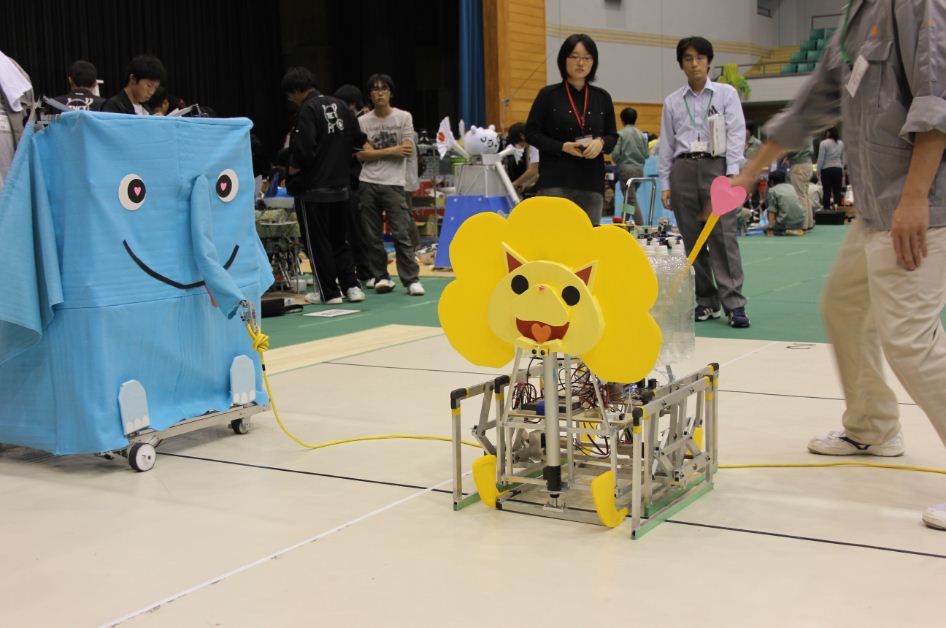
 一方ファミリー ManyCaの縄回しロボット。男鹿水族館のゴウタとクルミをモチーフにしています。
一方ファミリー ManyCaの縄回しロボット。男鹿水族館のゴウタとクルミをモチーフにしています。
 ファミリー ManyCaのマニカちゃん。かわいい!!それしか表現しようがないね。
ファミリー ManyCaのマニカちゃん。かわいい!!それしか表現しようがないね。
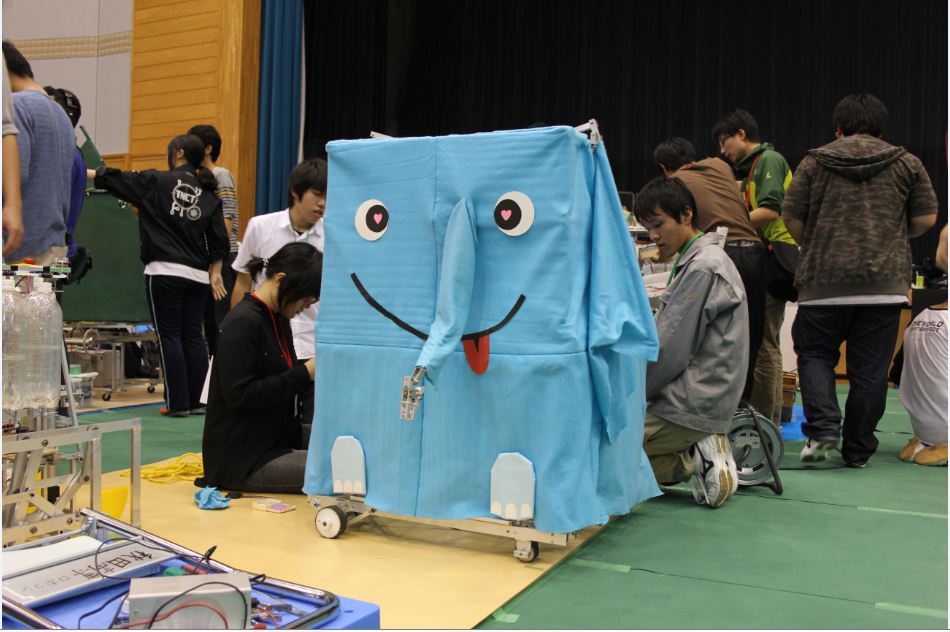 サークル・A・サーカスの縄回しロボットのゾウ。東北他高専でも、ゾウとライオンの組み合わせがあって、ネタがかぶった。
かわいさでは負けてないよね。
サークル・A・サーカスの縄回しロボットのゾウ。東北他高専でも、ゾウとライオンの組み合わせがあって、ネタがかぶった。
かわいさでは負けてないよね。
 かわいい!!
それしかない。ですよね。
かわいい!!
それしかない。ですよね。
 必死で縄回し。
必死で縄回し。
 マニカちゃんの足回りは、カムを使ったジャンプ。オリジナルと言うことで特別賞をもらったけど、かわいさとメカの
融合という感じ。
マニカちゃんの足回りは、カムを使ったジャンプ。オリジナルと言うことで特別賞をもらったけど、かわいさとメカの
融合という感じ。
 サークル・A・サーカスのジャンプ画像。いいね。両チームともほぼ東北大会でジャンプの練習がどんどん進み、大会後の高専祭の展示で
完璧なジャンプを披露していた。おいおい。遅い遅い。
サークル・A・サーカスのジャンプ画像。いいね。両チームともほぼ東北大会でジャンプの練習がどんどん進み、大会後の高専祭の展示で
完璧なジャンプを披露していた。おいおい。遅い遅い。
2014年ロボット A「‡‡新幹戦隊‡‡(東北ベスト4)」、B「How much?」(東北準優勝)
 今年度の競技課題「出前迅速」は、
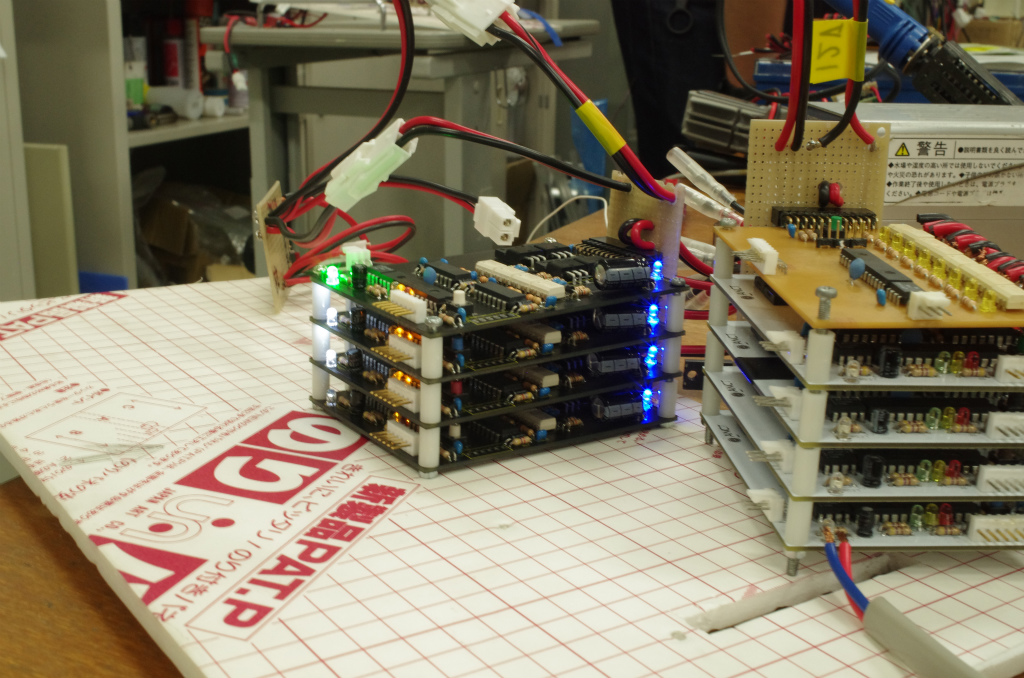
配達ロボットで、蕎麦の蒸籠を運ぶ。角材ゾーン、スロープゾーンがあり、受けロボットに蒸籠を渡してゴールする。蒸籠を運ぶ枚数が作戦で変わるなど
面白いルールでした。図は秋田高専ロボコンチームのモータドライバー、青LEDがかっこいいよね。
今年度の競技課題「出前迅速」は、
配達ロボットで、蕎麦の蒸籠を運ぶ。角材ゾーン、スロープゾーンがあり、受けロボットに蒸籠を渡してゴールする。蒸籠を運ぶ枚数が作戦で変わるなど
面白いルールでした。図は秋田高専ロボコンチームのモータドライバー、青LEDがかっこいいよね。
 ‡‡新幹戦隊‡‡の配達ロボット。クローラー、エアシリンダー、マクソン×4。うは。
‡‡新幹戦隊‡‡の配達ロボット。クローラー、エアシリンダー、マクソン×4。うは。
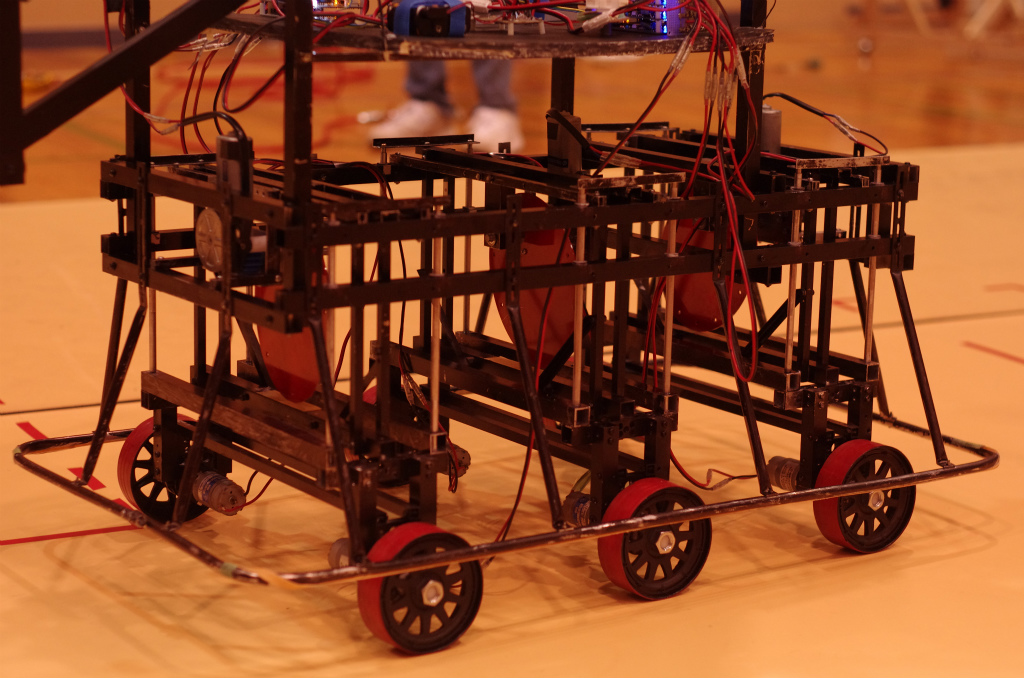 How much?の足回り。黒い方がかっこいいとか言って、大会3日前にバラして、マッキー(黒)で塗るのもうやめようね。
心臓に悪いから。足の上下はカムを使っています。パイプ曲げフェンダーは小林がアドバイスしました。
How much?の足回り。黒い方がかっこいいとか言って、大会3日前にバラして、マッキー(黒)で塗るのもうやめようね。
心臓に悪いから。足の上下はカムを使っています。パイプ曲げフェンダーは小林がアドバイスしました。
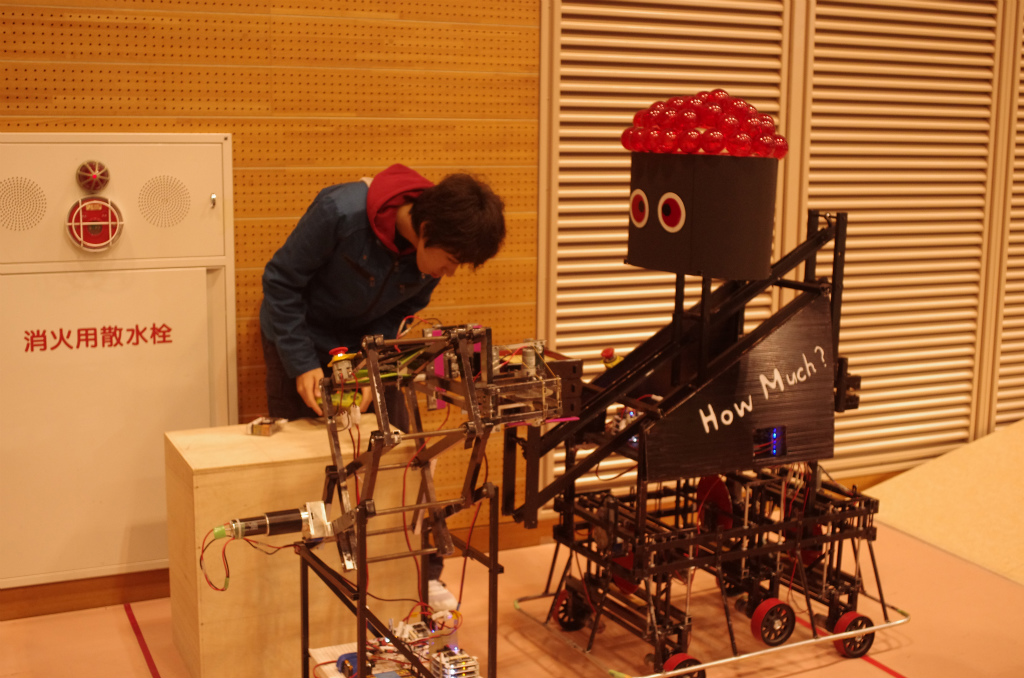 Poler & Bowlerである。配達ロボと受けロボの配達の様子。このロボットは、ハイテクではなくローテクで揺れを抑えています。
イクラのつぶつぶはガチャガチャのカプセル。赤はザクのモノアイの塗料を使っているそうです。(わかる?)
Poler & Bowlerである。配達ロボと受けロボの配達の様子。このロボットは、ハイテクではなくローテクで揺れを抑えています。
イクラのつぶつぶはガチャガチャのカプセル。赤はザクのモノアイの塗料を使っているそうです。(わかる?)
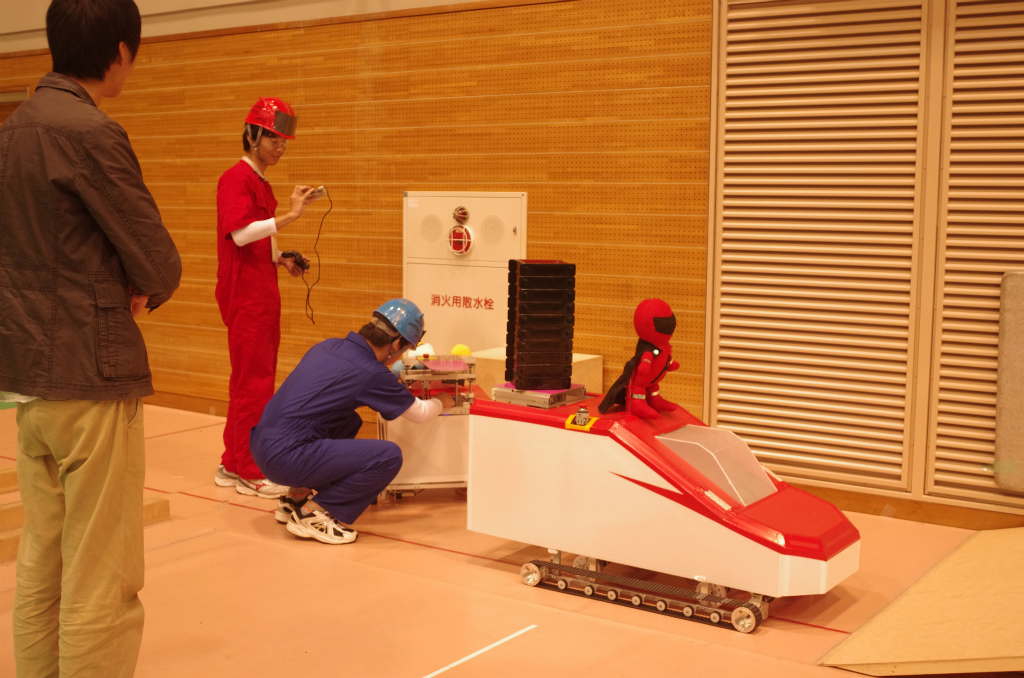 ‡‡新幹戦隊‡‡の配達の様子。受けロボのデザインが客車になっていて、配達は、連結シーンという凝りよう。
‡‡新幹戦隊‡‡の配達の様子。受けロボのデザインが客車になっていて、配達は、連結シーンという凝りよう。
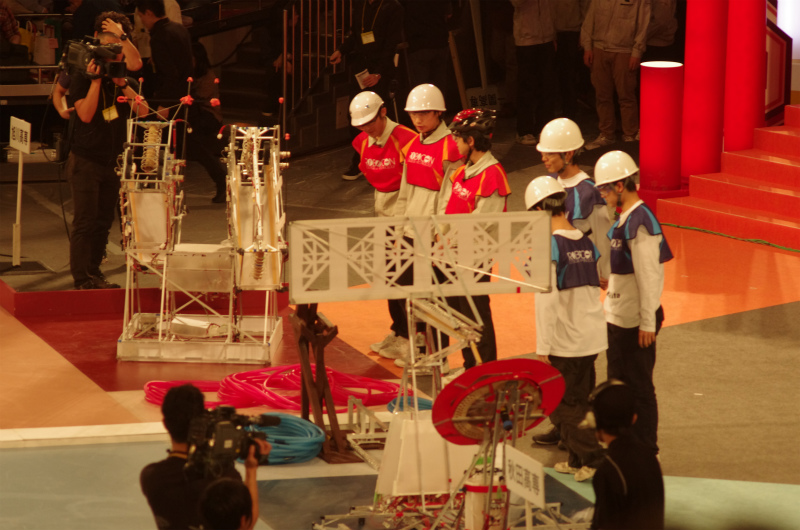
 おめでとう。みんなロボコンを楽しんでいたね。
おめでとう。みんなロボコンを楽しんでいたね。
2015年ロボット A「ワッカマン(東北準優勝)(全国2回戦敗退)」、B「BLUE HAWAII」(東北ベスト4)
 今年度の競技課題「輪花繚乱」は、
ロボットで、9つの高さの異なるポールに輪投げをするルールでした。自陣のポールのほか、何点でも入れられる相手ポール、真ん中のセンターポール(3本)
は一度に2本または3本入れると点数がアップするルールでした。久しぶりの全国をみんなで楽しんだシーズンでした。図は、東北大会でのAチーム。前日のテストラン
まずまずの結果でみんな笑顔。
今年度の競技課題「輪花繚乱」は、
ロボットで、9つの高さの異なるポールに輪投げをするルールでした。自陣のポールのほか、何点でも入れられる相手ポール、真ん中のセンターポール(3本)
は一度に2本または3本入れると点数がアップするルールでした。久しぶりの全国をみんなで楽しんだシーズンでした。図は、東北大会でのAチーム。前日のテストラン
まずまずの結果でみんな笑顔。
 Aチーム「ワッカマン」の当日の調整。真剣です。遠心力を使用して、カウボーイのように輪をダイナミックに投げる
というアイデアでした。オペレーターの黒崎君は何度もテストランを重ね、相当マシン操作に習熟していました。
Aチーム「ワッカマン」の当日の調整。真剣です。遠心力を使用して、カウボーイのように輪をダイナミックに投げる
というアイデアでした。オペレーターの黒崎君は何度もテストランを重ね、相当マシン操作に習熟していました。
 大会の試合直前です。相手チームの戦略に合わせ、入念に動きや作戦をチェックしていますね。
大会の試合直前です。相手チームの戦略に合わせ、入念に動きや作戦をチェックしていますね。
 一方、Bチーム「BLUE HAWAII」の動作チェック。エアシリンダを使用して、人間の腕のように輪を投げるというアイデア
でした。人形のはなびちゃんかわいいですね。これも秋田高専の伝統か??
一方、Bチーム「BLUE HAWAII」の動作チェック。エアシリンダを使用して、人間の腕のように輪を投げるというアイデア
でした。人形のはなびちゃんかわいいですね。これも秋田高専の伝統か??
 Bチーム試合前。余裕かましててイイのか??。それも持ち味。
Bチーム試合前。余裕かましててイイのか??。それも持ち味。
 お疲れ様でした。セットの前でパチリ。
お疲れ様でした。セットの前でパチリ。
 主将の秋山君も帰ってきました。みんなでピース。思いっきり楽しんだ。
主将の秋山君も帰ってきました。みんなでピース。思いっきり楽しんだ。
2015年全国大会(両国国技館)「ワッカマン」
 あこがれの両国。スクールカラーのグリーンジャージで応援団を待つ。
あこがれの両国。スクールカラーのグリーンジャージで応援団を待つ。
 首都圏を含む、秋田高専関係者の皆さんが、多数応援に来てくださいました。ありがとうございました。
首都圏を含む、秋田高専関係者の皆さんが、多数応援に来てくださいました。ありがとうございました。
 ちょっとピンぼけですが、校旗を持って入場の様子。
ちょっとピンぼけですが、校旗を持って入場の様子。
 試合前の様子。残念ながら通信の不調により2回戦敗退でした。いろいろな経験をしたね。来年も両国に来たいですね。
試合前の様子。残念ながら通信の不調により2回戦敗退でした。いろいろな経験をしたね。来年も両国に来たいですね。
 支度部屋での、秋山主将とロボット。
支度部屋での、秋山主将とロボット。
 両国らしい面白いポーズをとる先輩がた。
両国らしい面白いポーズをとる先輩がた。
 2006年全国メンバーも来てくれました。久しぶり、うれしいね。
2006年全国メンバーも来てくれました。久しぶり、うれしいね。
ホームへ
 2000年ロボット「機楽」 (東北大会優勝 全国ベスト8)
2000年ロボット「機楽」 (東北大会優勝 全国ベスト8) 

 私たちは階段のようなスロープにのぼり、爪を付けて固定してから、造形物を置く。という作戦をとりました。
私たちは階段のようなスロープにのぼり、爪を付けて固定してから、造形物を置く。という作戦をとりました。
 2001年ロボット「D・N・A・機楽」 (東北大会初戦敗退)
2001年ロボット「D・N・A・機楽」 (東北大会初戦敗退) 

 これが唯一のこる2001年ロボット「D・N・A・機楽の雄姿」。大会直前に肩の部分のフレームを落として、軽量化したりしました。この頃、電気回路を
自分たちで開発しないといけないと思いましたね。
これが唯一のこる2001年ロボット「D・N・A・機楽の雄姿」。大会直前に肩の部分のフレームを落として、軽量化したりしました。この頃、電気回路を
自分たちで開発しないといけないと思いましたね。